Why Physical AI is Hard
By Dexterity
Physical AI is AI that powers robots to do physical tasks in the real world. It sounds simple. It is extraordinarily hard. In fact, building AI systems that reliably manipulate objects in unstructured environments may be comparable in complexity to autonomous driving, a field that has absorbed over $100 billion in investment over the past fifteen years and is still not fully solved.
The core challenge is this: the physical world is infinitely variable. Objects are deformable. Environments change between shifts. Lighting conditions fluctuate. Boxes arrive in random sizes, weights, and orientations. A system that works perfectly in simulation will fail the moment it encounters a crushed box, a shifted pallet, or a trailer floor that is not perfectly flat.
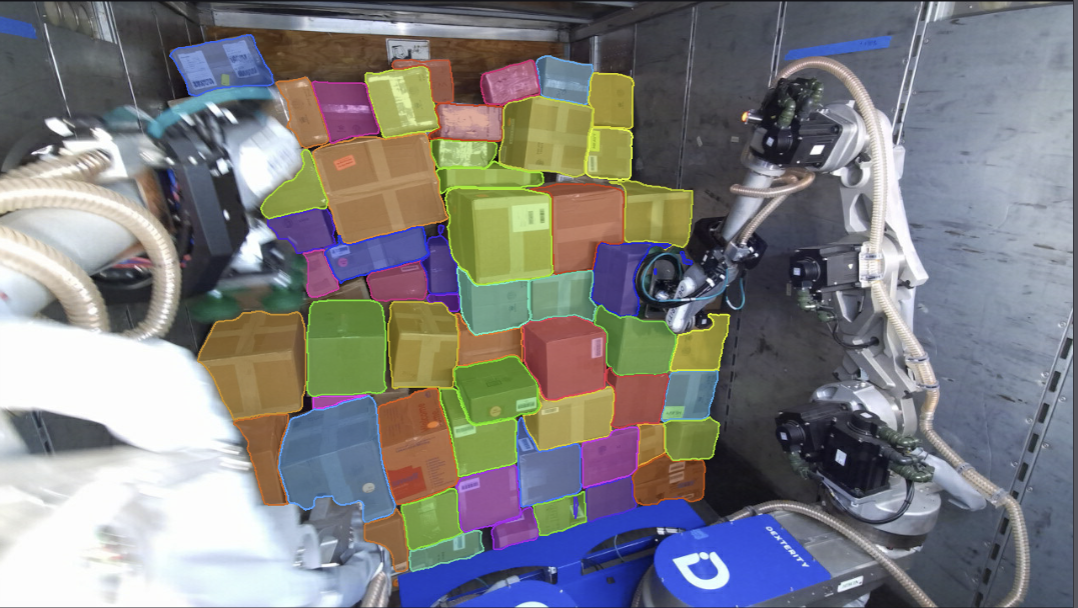
Consider what a robot must do to load a truck. It needs to perceive hundreds of boxes in real time using 3D cameras and depth sensors. It needs to reason about which box to pick next, accounting for weight, fragility, destination, and optimal packing geometry. It needs to plan a collision-free path for two arms operating simultaneously in a confined space. It needs to grasp each box with exactly the right force: firm enough to hold, gentle enough not to crush. And it needs to do all of this at production speed, thousands of times per shift, with near-zero error rates.
This is not one AI problem. It is dozens of AI problems that must be solved simultaneously and composed together into a coherent system. Perception, planning, motion control, force control, task allocation, collision avoidance, anomaly detection: each is a frontier research challenge in its own right. Solving them individually is hard. Making them work together reliably is where most approaches fail.
The safety requirements compound the difficulty. Say a robot performs 300 actions per hour. To run for just one month without a single safety incident, you need 99.9995% confidence that every action is safe. Most people would prefer their robots run for ten years before breaking, and never injure a person. This level of reliability cannot be achieved by any single monolithic AI model. It requires an architecture where every component is interpretable, every action is bounded, and every failure mode is anticipated.
The history of robotics is littered with companies that raised hundreds of millions of dollars and failed. The pattern is consistent: impressive demos that do not survive contact with production reality. The gap between a robot that works in a controlled lab and one that works across thousands of shifts in dozens of facilities is not incremental; it is fundamental. Bridging that gap requires not just better AI, but a different approach to building AI systems.
Dexterity's approach is compositional. Rather than building one massive model that tries to do everything, we build teams of specialized AI agents, each responsible for a specific capability, each independently interpretable, each providing software-transaction-level guarantees on its behavior. An orchestrator called Arbiter coordinates these agents in real time, managing task allocation, resolving conflicts, and enforcing safety constraints. The result is a system where you can trace exactly why the robot did what it did, and where failures are contained rather than catastrophic.
This architecture has enabled something no other company has achieved: production-scale Physical AI. Over 100 million autonomous actions executed in real enterprise operations. Not demos. Not pilots. Production, across multiple Fortune 50 customers, multiple geographies, multiple applications, running 24/7.
The market opportunity for Physical AI is comparable to autonomous vehicles. Every warehouse, every distribution center, every manufacturing facility, every logistics operation in the world has tasks that require the kind of intelligent physical manipulation that only humans can currently provide. The companies that solve this problem, reliably, safely, at scale, will define the next era of industrial automation.
Physical AI is hard. That is precisely the point. The difficulty is the moat.